Ein 6-Achs-Knicksarmroboter soll das Aufnehmen, Transport und Ablegen eines Werkstückes mittels Unterdruckgreifer realisieren. Folgende Bedingungen müssen erfüllt sein bzw. folgende Parameter sind gegeben:
- Senkrechte Aufnehmen des Werkstücks vom Transportsystem (Sockel A, Höhe = 800 mm)
- Einlegen des Werkstückes in den Werkstückträger die linksseitige Maschine (Sockel B, Höhe des Flächenmittelpunkt der Vertiefung 60mm)
- Neigung des Werkstückträgers 45b Grad bzgl. Der horizontalen Ebne in Richtung Roboter
- Einlegetiefe in Sockel B: 4mm
- Anordnung (Abstände bezogen auf den Flächenmittelpunt): RA=1100mm, RB= 80mm
- Werkstückhöhe = 100 mm
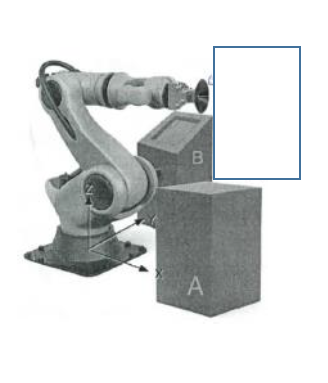
Welche Stellungen müssen nacheinander angefahren werden, um die gegebene Handhabungsaufgabe geeignet (ohne Kollision) zu erfüllen. Geben Sie anhand der gegebenen Parameter die geeigneten Stellungen des Tool-Center-Point an. Berücksichtigen Sie auch eine entsprechende Reihenfolge und benennen Sie die Stellungen aussagekräftig. Die im Bild gezeigte Stellung (1000,0,1500,0°,0°,0°) ist die Nullstellung und bezieht sich auf das Benutzerkoordinatensystem mit Ursprung in der Basis des Roboters (Flächenmitte auf Höhe 0). Die Orientierung ist durch die Rotationswinkel um z-, y-, und x-Achse des Benutzerkoordinatensystems (in dieser Reihenfolge) angegeben und bezieht sich auf die Nullstellung.
Es sind vier Positionen, die man in dieser Aufgabe betrachten muss, einmal zwei Positionen direkt über die Sockel und zwei auf dem Sockel. Aber ich weiß nicht wie ich dies durch (x,y,z,alpha,Beta,Gamma) darstellen muss.