Zusammenhang von Weg-Zeit-Funktion S(t)=.. und Geschwindigkeits-Zeit-Funktion V(t)=..
und Beschleunigungs-Zeit-Funktion a(t)=..
1) a(t)=.. nun 2 mal integrieren
2) V(t)=....+C1
3) S(t)=.... +C2
Hier C1=Vo=Geschwindigkeit zum Zeitpunkt t=0
C2=So=schon zurückgelegter Weg zum Zeitpunkt t=0
umgekehrt
V´(t)=dv/dt=0=.. Maximum und Minimum von der Geschwindigkeit
V´´(t)=0= Wendepunkt maximaler Anstieg der Geschwindigkeit
Analogie f(x)=... → f´(x)=m → f´´(x)=..
Infos,Kurvendiskussion,vergrößern und/oder herunterladen
Text erkannt:
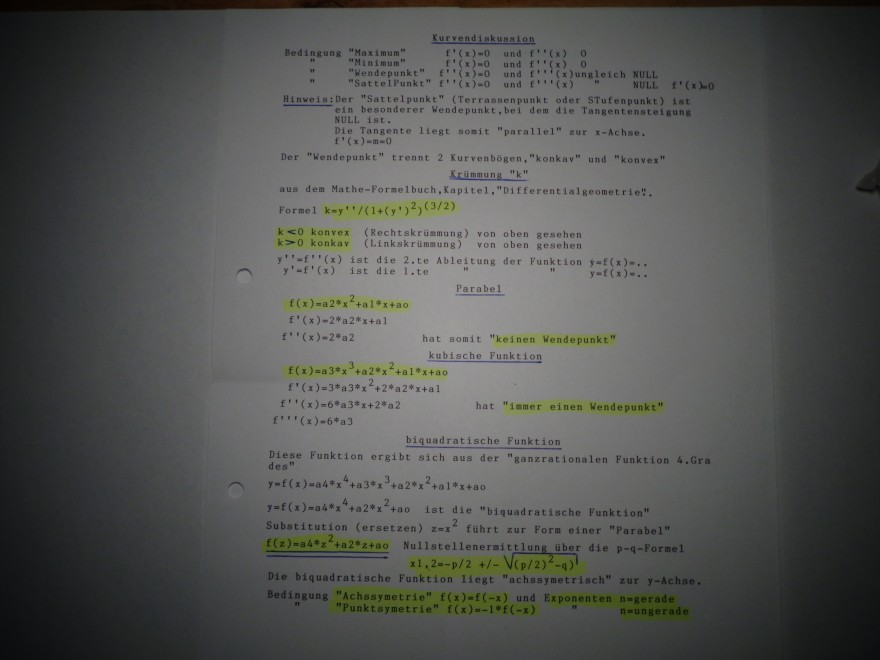
ndiskussi Bedingung "Maximum"
$$ f^{\prime}(x)=0 \text { and } f^{\prime \prime}(x) $$
Hinveis: Der "Sattelpunkt" (Terrassenpunkt eder STufenpunkt) tate e in besonderer vendepunkt, bei dem die Tangentenstersung xuLL 1st. Die Tangente liegt somit "parallel" zur x-Achse.
$$ f^{\prime}(x)=x-0 $$
Der "Wendepunke" trennt 2 Kurvenbogen,"konkav" und "konvex" Krummung "k" aus dem Mathe-Porme1buch, Xapite1,"D1fferentia1geometrie".
$$ \text { Formel } k=y^{\prime \prime} /\left(1+\left(y^{*}\right)^{2}\right)^{(3 / 2)} $$
\( k<0 \) konvex (Rechtskräsmung) von oben gesehen \( k>0 \) konkav (Linkskrumung) von oben gesehen
\( y^{\prime \prime}=f^{\prime \prime}(x) \) ist die 2 . te Ableltung der Punktion \( y=f(x)=. . . \)
\( y^{\prime}=f^{\prime}(x) \) ist die 1 . te
Parabel
$$ \begin{array}{l} f(x)=a 2 * x^{2}+a 1 * x+a 0 \\ f^{\prime}(x)=2 * a 2 * x+a 1 \\ f^{\prime \prime}(x)=2 * a 2 \end{array} \text { hat somit "keinen Wendepunkt" } $$
kubische Punkti
$$ \begin{array}{l} f(x)=a 3 * x^{3}+a 2 * x^{2}+a 1 * x+a 0 \\ f^{\prime}(x)=3 * a 3 * x^{2}+2 * a 2 * x+a 1 \end{array} $$
\( f^{\prime \prime}(x)=6^{*} a 3^{*} x+2^{*} a 2 \quad \) hat " iemer einen Wendepunkt"
$$ f^{\prime \prime \prime}(x)-6^{*} a 3 $$
biquadratische Punktion Diese Funktion ergibt sich aus der "ganzrationalen Punktion \( 4.6 \mathrm{ra} \)
des"
\( y=f(x)=a 4^{*} x^{4}+a 3 * x^{3}+a 2^{*} x^{2}+a 1 * x+a 0 \)
\( y=f(x)=a 4^{*} x^{4}+a 2^{*} x^{2}+a 0 \quad \) ist die "biquadratische Punktion" Substitution (ersetzen) \( z=x^{2} \) funrt zur Porm einer "Parabel"
\( f(z)=a 4^{*} z^{2}+a 2^{*} z+a 0 \quad \) Nu11ste 11 eneralt
$$ x 1,2=-p / 2+1-\sqrt{\left.(p / 2)^{2}-q\right)} $$
Die biquadratische Funktion liegt "achssymmetrisch" zur y-Achse. Bedingung "Achssymmetrie" f( \( x \) ) \( =f(-x) \) und Exponenten nuserade "Punktsymmetrie" f(x) =-1*f(-x) " n=ungerade